Das Wichtigste in Kürze
Alle Punkte \(P\) einer Ebene \(E\) mit dem Punkt \(A \in E\) kann beschrieben werden durch die folgende Gleichung der Ebene:
\[ E \colon \;\; \overrightarrow{OP} \; = \; \overrightarrow{OA} + \lambda_1 \cdot \vec{a_1} + \lambda_2 \cdot \vec{a_2} \]
\[ E \colon \;\; \begin{pmatrix} x \\ y \\ z \end{pmatrix} \; = \; \begin{pmatrix} A_x \\ A_y \\ A_z \end{pmatrix} + \lambda_1 \cdot \begin{pmatrix} a_{1,x} \\ a_{1,y} \\ a_{1,z} \end{pmatrix} + \lambda_2 \cdot \begin{pmatrix} a_{2,x} \\ a_{2,y} \\ a_{2,z} \end{pmatrix} \]
Der Vektor \(\overrightarrow{OA}\) heisst wieder Stützvektor, da der die Position der Ebene fixiert. Die beiden Richtungsvektoren \(\vec{a_1}\) und \(\vec{a_2}\) spannen die Ebene auf und dürfen deshalb nicht kollinear sein, da sie sonst nur eine Gerade aufspannen würden. Wir verlangen deshalb:
\[ \vec{a_1} \times \vec{a_2} \; \neq \; \vec{0} \]
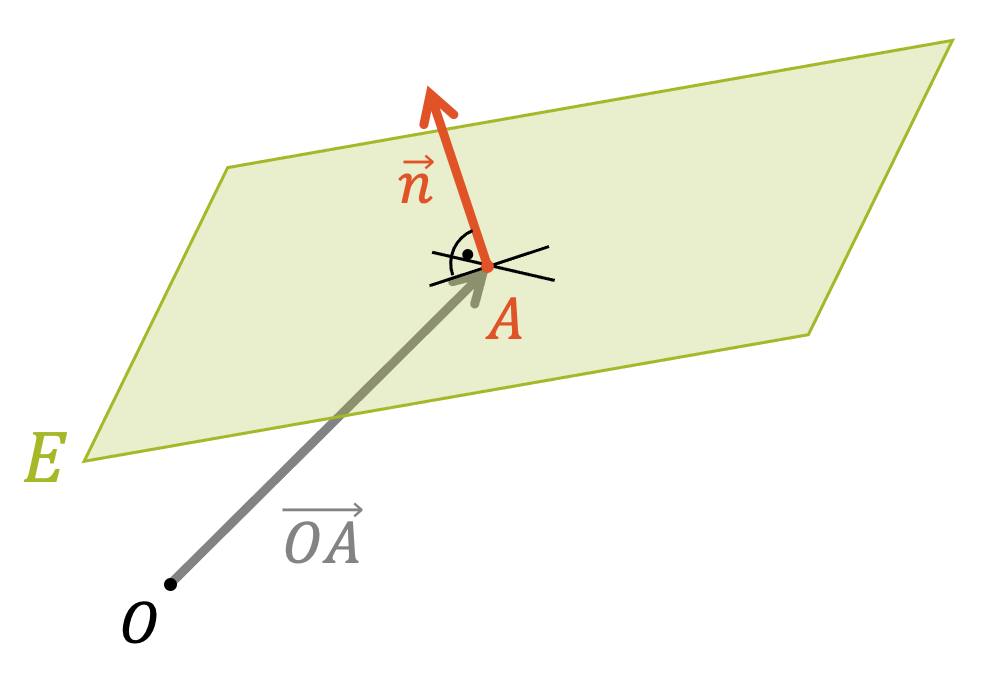
Die Normalform einer Ebene wird ausgedrückt mit dem Stützvektor \(\overrightarrow{OA}\), der zum Startpunkt \(A\) auf der Ebene zeigt und dem Normalvektor \(\vec{n}\), der senkrecht zur Ebene \(E\) steht. Die Gleichung gilt für alle Punkte \(P\) auf der Ebene:
\[ E \colon \;\; \vec{n} \cdot \big( \overrightarrow{OP} – \overrightarrow{OA} \big) = 0 \]
In Komponentenschreibweise erhalten wir:
\[ E \colon \;\; \begin{pmatrix} n_x \\ n_y \\ n_z \end{pmatrix} \cdot \begin{pmatrix} \begin{pmatrix} x \\ y \\ z \end{pmatrix} – \begin{pmatrix} A_x \\ A_y \\ A_z \end{pmatrix} \end{pmatrix} = 0 \]
Da \(P\) für alle möglichen Punkte auf der Ebene steht, sind seine Koordinaten \(P(x,y,z)\).
Die Koordinatenform einer Ebene ist die ausmultiplizierte Normalform:
\[ E \colon \;\; a \cdot x \; + \; b \cdot y \; + \; c \cdot z \; + \; d \;\; = \;\; 0 \]
Dabei entsprechen die Koeffizienten \(a=n_x\), \(b=n_y\), \(c=n_z\) und \(d=-\vec{n} \cdot \overrightarrow{OA}\)
Videos
-
Parameterform, Normalform und Koordinatenform aufstellen (5049-1)

Dauer: 23 min 43 s
-
Koordinatenform von Ebenen aufgrund einer Zeichnung (5049-3)
Dauer: 20 min 32 s
-
Ebene wird von zwei Geraden aufgespannt (5049-4)
Dauer: 18 min 58 s
-
Ebene wird von zwei Geraden aufgespannt (5049-5)

Dauer: 11 min 17 s
-
Ebenen finden, die zu Punkten einen bestimmten Abstand haben (5049-6)
Dauer: 16 min 16 s
-
Schnittkreis einer Ebene mit einer Kugel (5051-6)

-
Gleichung einer Ebene – Parameterform (Teil 1) (Tutorial)

Dauer: 5 min 03 s
-
Gleichung einer Ebene – Parameterform (Teil 2) (Tutorial)

Dauer: 12 min 54 s
-
Gleichung einer Ebene – Normalform (Tutorial)

Dauer: 15 min 21 s
-
Gleichung einer Ebene – Koordinatenform (Teil 1) (Tutorial)

Dauer: 11 min 06 s
-
Gleichung einer Ebene – Koordinatenform (Teil 2) (Tutorial)

Dauer: 7 min 30 s
Parameterform
Bei der Besprechung der Linearkombination haben wir festgestellt, dass ein Vektor mit durch eine Linearkombination von zwei Vektoren ausgedrückt werden kann. Wir hatten das folgende Beispiel gesehen:
\[ \begin{pmatrix} 3 \\ 2 \end{pmatrix} \;\; = \;\; 3 \cdot \begin{pmatrix} 1 \\ 0 \end{pmatrix} + 2 \cdot \begin{pmatrix} 0 \\ 1 \end{pmatrix} \]
\[ = 3 \cdot \vec{e_x} + 2 \cdot \vec{e_y} \]
Wir sehen dann, dass wir eigentlich jeden Punkt \(P(P_x,P_y)\) auf diese Art erreichen können:
\[ \overrightarrow{OP} = \begin{pmatrix} P_x \\ P_y \end{pmatrix} \;\; = \;\; P_x \cdot \begin{pmatrix} 1 \\ 0 \end{pmatrix} + P_y \cdot \begin{pmatrix} 0 \\ 1 \end{pmatrix} \]
\[ = P_x \cdot \vec{e_x} + P_y \cdot \vec{e_y} \]
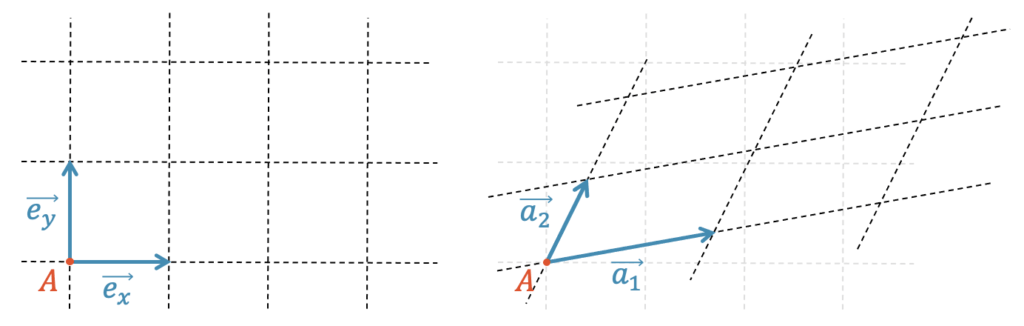
Wir können mit einer Linearkombination der beiden Vektoren \(\vec{e_x}\) und \(\vec{e_y}\) jeden Punkt \(P\) in der \(x,y\)-Ebene erreichen – oder – alle Punkte der ganzen \(x,y\)-Ebene, die durch die Vektoren \(\vec{e_x}\) und \(\vec{e_y}\) aufgespannt wird, kann mit einer Vektorgleichung beschrieben werden.
Es ist zu beachten, dass nicht nur die Einheitsvektoren \(\vec{e_x}\) und \(\vec{e_y}\) die \(x,y\)-Ebene aufspannen, sondern beliebige Paare von Vektoren, die in der \(x,y\)-Ebene und nicht kollinear sind. Wir können deshalb auch zwei Vektoren \(\vec{a_1}\) und \(\vec{a_2}\) nehmen und damit jeden Punkt der \(x,y\)-Ebene erreichen. Die Linearkombination ist eine andere, d.h. die “Koordinaten” im schiefwinkligen System von \(\vec{a_1}\) und \(\vec{a_2}\) sind anders, als die \(x-\) und \(y-\)Koordinaten.
Du erkennst sicher die Ähnlichkeit zur Gleichung einer Geraden \(g\):
\[ g \colon \;\; \overrightarrow{OP} \; = \; \overrightarrow{OA} + \lambda \cdot \vec{a} \]
Für die Ebene folgt entsprechend:
\[ E \colon \;\; \overrightarrow{OP} \; = \; \overrightarrow{OA} + \lambda_1 \cdot \vec{a_1} + \lambda_2 \cdot \vec{a_2} \]
Hier ist es aber wichtig, dass die beiden Richtungsvektoren \(\vec{a_1}\) und \(\vec{a_2}\) auch wirklich eine Ebene aufspannen. Das tun sie, wenn sie nicht kollinear sind, d.h. wir müssen sicherstellen, dass ihr Vektorprodukt nicht null ist:
\[ \vec{a_1} \times \vec{a_2} \; \neq \; \vec{0} \]
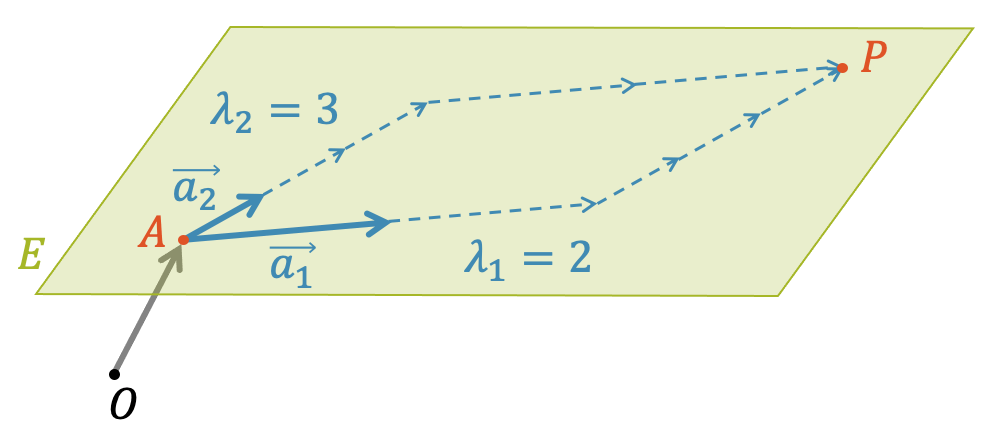
Alle Punkte \(P\) einer Ebene \(E\) mit dem Punkt \(A \in E\) kann beschrieben werden durch die folgende Gleichung der Ebene:
\[ E \colon \;\; \overrightarrow{OP} \; = \; \overrightarrow{OA} + \lambda_1 \cdot \vec{a_1} + \lambda_2 \cdot \vec{a_2} \]
\[ E \colon \;\; \begin{pmatrix} x \\ y \\ z \end{pmatrix} \; = \; \begin{pmatrix} A_x \\ A_y \\ A_z \end{pmatrix} + \lambda_1 \cdot \begin{pmatrix} a_{1,x} \\ a_{1,y} \\ a_{1,z} \end{pmatrix} + \lambda_2 \cdot \begin{pmatrix} a_{2,x} \\ a_{2,y} \\ a_{2,z} \end{pmatrix} \]
Der Vektor \(\overrightarrow{OA}\) heisst wieder Stützvektor, da der die Position der Ebene fixiert. Die beiden Richtungsvektoren \(\vec{a_1}\) und \(\vec{a_2}\) spannen die Ebene auf und dürfen deshalb nicht kollinear sein, da sie sonst nur eine Gerade aufspannen würden. Wir verlangen deshalb:
\[ \vec{a_1} \times \vec{a_2} \; \neq \; \vec{0} \]
Die reellen Parameter \(\lambda_1\) und \(\lambda_2\) (positiv oder negativ) bestimmen die Linearkombination von \(\vec{a_1}\) und \(\vec{a_2}\). Aus ihr folgt, welcher Punkt \(P\) von \(A\) aus erreicht wird, analog zur Gleichung einer Geraden.
In der folgenden Grafik sehen wir, wie der Punkt \(P\) von \(A\) aus mit \(2 \cdot \vec{a_1}\) und \(3 \cdot \vec{a_2}\) erreicht wird. Jede erdenkliche Linearkombination mit den Parametern \(\lambda_1\) und \(\lambda_2\) wird jeden erdenklichen Punkt auf der Ebene \(E\) erreichen.
Beispiel
Finde die Parameter \(\lambda_1\) und \(\lambda_2\), mit welchen der Punkt \(P(-23,12,46)\) auf der Ebene, von \(A(1,0,-2)\) aus, erreicht wird.
\[ E: \;\; \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 1 \\ 0 \\ -2 \end{pmatrix} + \lambda_1 \cdot \begin{pmatrix} 2 \\ 4 \\ 16 \end{pmatrix} + \lambda_2 \cdot \begin{pmatrix} 10 \\ -4 \\ -16 \end{pmatrix} \]
Normalform
Bei der Diskussion der Gleichung einer Geraden hatten wir die Normalform kennengelernt. Wir hatten damals schon gesagt, dass im dreidimensionalen Raum ein Normalvektor eigentlich normal zu einer Ebene ist. Da wir damals eine Gerade beschreiben wollten, hatten wir uns auf den zweidimensionalen Raum beschränkt, so dass aus der Ebene eine Gerade wurde.
Jetzt können wir unser Wissen zur Normalform wieder einsetzen: Für die Beschreibung der Ausrichtung der Ebene reicht der Normalvektor \(\vec{n}\) aus. Wo diese ausgerichtete Ebene nun aber genau ist, wird durch einen verbindlichen Punkt \(A\) auf der Ebene bzw. durch ihren Ortsvektor, den Stützvektor \(\overrightarrow{OA}\) beschrieben.
Beispiel
Die Ebene \(E\) enthält die Punkte \(A(2,0,-8)\), \(B(0,0,-12)\) und \(C(2,2,-2)\). Finde ihre Normalform.
Koordinatenform
Die Koordinatenform folgt direkt aus der Normalform. Wir müssen dazu einfach das Skalarprodukt der Normalform ausmultiplizieren:
\[ \begin{pmatrix} n_x \\ n_y \\ n_z \end{pmatrix} \cdot \begin{pmatrix} \begin{pmatrix} x \\ y \\ z \end{pmatrix} – \begin{pmatrix} A_x \\ A_y \\ A_z \end{pmatrix} \end{pmatrix} \]
\[ = \begin{pmatrix} n_x \\ n_y \\ n_z \end{pmatrix} \cdot \begin{pmatrix} x-A_x \\ y-A_y \\ z-A_z \end{pmatrix} = 0 \]
\[ \quad n_x \cdot (x – A_x) + n_y \cdot (y – A_y) + n_z \cdot (z – A_z) = 0 \]
\[ \quad n_x \cdot x + n_y \cdot y + n_z \cdot z – (n_x A_x + n_y A_y + n_z A_z) = 0 \]
Der Ausdruck in der Klammer wird als Zahl \(-d\) abgekürzt:
\[ \quad n_x \cdot x + n_y \cdot y + n_z \cdot z + d = 0 \]
Beispiel
Gegeben ist der Normalvektor \(\vec{n}\) einer Ebene \(E\), die auch den Punkt \(A(2,0,-8)\) umfasst. Finde die Normalform und die Koordinatenform für diese Ebene.
Beispiel
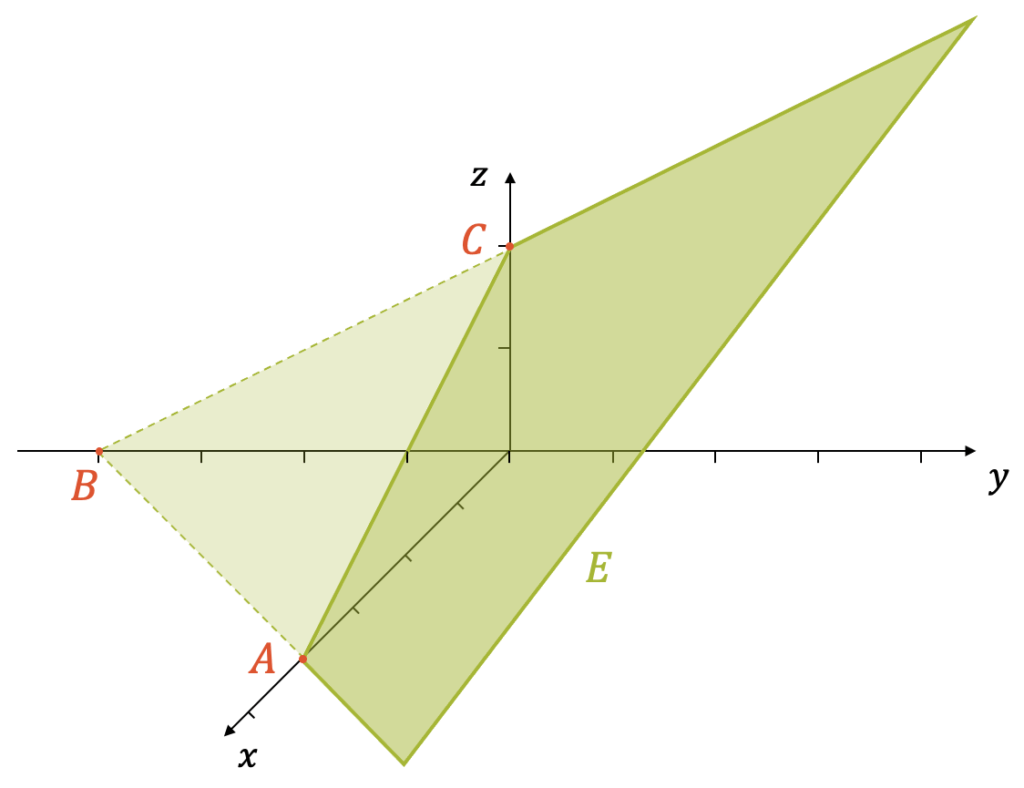
Bestimme die Achsabschnitte der Ebene \(E\) auf der \(x-\), \(y-\) und \(z-\)Achse und zeichne die Ebene \(E\) im dreidimensionalen Koordinatensystem.
\[ E \colon \;\; x – y + 2z – 4 = 0 \]
Auf der \(x\)-Achse gilt: \(y=0\) und \(z=0\). Da wir die \(x\)-Achse mit der Ebene schneiden, setzen wir sie gleich bzw. wir setzen \(y=0\) und \(z=0\) in die Ebenengleichung ein und erhalten:
\[ y=0, z=0 \quad \rightarrow \quad x – 0 + 2 \cdot 0 – 4 \]
\[ = 0 \quad \rightarrow \quad x=4 \quad \rightarrow \quad \underline{A(4,0,0)} \]
Die \(x\)-Achse wird im Punkt \(A(4,0,0)\) geschnitten. Analog erhalten wir die anderen Schnittpunkte:
\[ x=0, z=0 \quad \rightarrow \quad 0 – y + 2 \cdot 0 – 4 = 0 \]
\[ \rightarrow \quad y=(-4) \quad \rightarrow \quad \underline{B(0,-4,0)} \]
\[ x=0, y=0 \quad \rightarrow \quad 0 – 0 + 2 \cdot z – 4 = 0 \]
\[ \rightarrow \quad z=2 \quad \rightarrow \quad \underline{C(0,0,2)} \]
Aufgabensammlung
-
Gleichung einer Ebene (5049) – Aufg. 1
3 Teilaufgaben (pdf/Video-Lösung):
Parameterform, Normalform und Koordinatenform aufstellen -
Gleichung einer Ebene (5049) – Aufg. 3
4 Teilaufgaben (pdf/Video-Lösung):
Koordinatenform von Ebenen aufgrund einer Zeichnung -
Gleichung einer Ebene (5049) – Aufg. 4
2 Teilaufgaben (pdf/Video-Lösung):
Ebene wird von zwei Geraden aufgespannt -
Gleichung einer Ebene (5049) – Aufg. 5
1 Aufgabe (pdf/Video-Lösung):
Ebene wird von zwei Geraden aufgespannt -
Gleichung einer Ebene (5049) – Aufg. 6
1 Aufgabe (pdf/Video-Lösung):
Ebenen finden, die zu Punkten einen bestimmten Abstand haben -
Kreise und Kugeln (5051) – Aufg. 6
1 Aufgabe (pdf/Video-Lösung):
Schnittkreis einer Ebene mit einer Kugel
Mini-Test
Um Zugang zum Mini-Test zu kriegen,
musst du vollwertiges Mitglied im Hacker-Club sein.

publiziert:
überarbeitet:
publiziert:
überarbeitet:
Schreib deine Frage / Kommentar hier unten rein. Ich werde sie beantworten.
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.