Inhalt
Das Wichtigste in Kürze
Eine Abbildung von einem Punkt \(A\) auf einen Punkt \(A’\) wird durch einen Vektor beschrieben. Die Änderung der \(x\)-Koordinate (\(v_x = \Delta x\)) steht in der Klammer oben, unten steht die Änderung der \(y\)-Koordinate (\(v_y = \Delta y\)):
\[ \overrightarrow{AA’} = \begin{pmatrix} A’_x – A_x \\ A’_y – A_y \end{pmatrix} = \begin{pmatrix} v_x v_y \end{pmatrix} = \vec{v} \]
Vektoren haben eine Richtung und eine Länge. Die Länge wird durch die sog. Norm ausgedrückt und mit dem Satz von Pythagoras berechnet:
\[ \vec{v} = \begin{pmatrix} v_x \\ v_y \end{pmatrix} \quad \rightarrow \quad v = |\vec{v}| = \sqrt{v_x^2 + v_y^2} \]
Wenn nur die Richtung interessiert, wird der Vektor \(\vec{v}\) durch seine eigene Länge geteilt, so dass wir einen Einheitsvektor \(\vec{n}\) erhalten, der in die gleiche Richtung wie \(\vec{v}\) zeigt, jedoch mit der Länge eins.
\[ \vec{n} = \frac{\;\vec{v}\;}{|\vec{v}|} \]
Ein Vektor ist eine Abbildung von einem Punkt \(A(A_x,A_y)\) zu einem Punkt \(A'(A’_x,A’_y)\) mit einer Richtung und einer Länge:
\[ \vec{v}: \quad A(A_x,A_y) \; \mapsto \; A'(A’_x,A’_y) \]
Die Komponenten \(v_x\) und \(v_y\) des Vektors \(\vec{v}\) ergeben sich aus den Differenzen der Koordinaten der beiden Punkte. Wir können den Vektor auch als Verschiebung anschauen mit der Änderung der \(x\)-Koordinate um den Betrag \(v_x\) und der \(y\)-Koordinate um den Betrag \(v_y\):
\[ \vec{v} = \begin{pmatrix} v_x \\ v_y \end{pmatrix} = \begin{pmatrix} A’_x – A_x \\ A’_y – A_y \end{pmatrix} \]
Unter der Norm eines Vektors verstehen wir die Länge des Vektorpfeils. Sie wird aus den Komponenten \(v_x\) und \(v_y\) mit dem Satz des Pythagoras berechnet:
\[ \vec{v} = \begin{pmatrix} v_x \\ v_y \end{pmatrix} \quad \rightarrow \quad v = |\vec{v}| = \sqrt{v_x^2 + v_y^2} \]
Die Norm wird mit Betragsstrichen links und rechts des Vektors geschrieben. Meistens wird mit \(\,v\,\) (ohne Pfeil) automatisch auch die Norm von \(\,\vec{v}\,\) gemeint.
Der Einheitsvektor \(\vec{n}\) hat die gleiche Richtung wie \(\vec{v}\), aber er hat die Länge eins. Wir erhalten den Einheitsvektor, indem wir den Vektor \(\vec{v}\) durch seine eigene Länge teilen:
\[ \vec{n} = \frac{\;\vec{v}\;}{|\vec{v}|} \]
Unter dem Ortsvektor des Punktes \(A(A_x,A_y)\) verstehen wir einen Vektor, der vom Koordinatenursprung \(0\) zu diesem Punkt \(A\) zeigt.
\[ \overrightarrow{0A} = \begin{pmatrix} A_x \\ A_y \end{pmatrix} \]
Weitere Artikel zu diesem Thema:
Videos
-
Linearkombinationen von Vektoren (5031-5)

Dauer: 13 min 05 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Vektoren im Raum aufstellen (5031-1)

Dauer: 5 min 21 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Dreidimensionales Koordinatensystem (5031-2)

Dauer: 14 min 37 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Addition von Vektoren (5031-3)
Dauer: 20 min 55 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Grafischer Beweis betreffend Addition von Vektoren (5031-4)
Dauer: 9 min 03 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Vektoren aufgrund von zwei Punkten (Tutorial)

Dauer: 6 min 03 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Norm eines Vektors (Tutorial)

Dauer: 4 min 08 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Einheitsvektor (Tutorial)

Dauer: 4 min 57 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Gegenvektor (Tutorial)

Dauer: 2 min 15 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
-
Ortsvektor (Tutorial)

Dauer: 2 min 22 s
Du musst dich hier einloggen, um das Video anzusehen. Noch kein Login?
Vektoren als Abbildungen von Punkten
Wir schauen uns als Erstes ein Beispiel an. In der nachfolgenden Grafik haben wir einen Pfeil der vom Punkt \(A\) zum Punkt \(A’\) zeigt. Genauso zeigt ein Pfeil vom Punkt \(B\) zu \(B’\) und von \(C\) zu \(C’\). Es fällt vielleicht auf, dass die Pfeile alle parallel zu einander und gleich lang sind. Es handelt sich tatsächlich um ein und denselben Vektor, den wir \(\;\vec{v}\;\) nennen.
Vektoren werden als solche gekennzeichnet, indem sie oben mit einem kleinen Pfeil versehen werden. In der Literatur gibt es auch die Schreibweisen in fett und mit einem Zirkumflex: \(\;\mathbf{v}\;\) oder \(\;\hat{v}\;\)
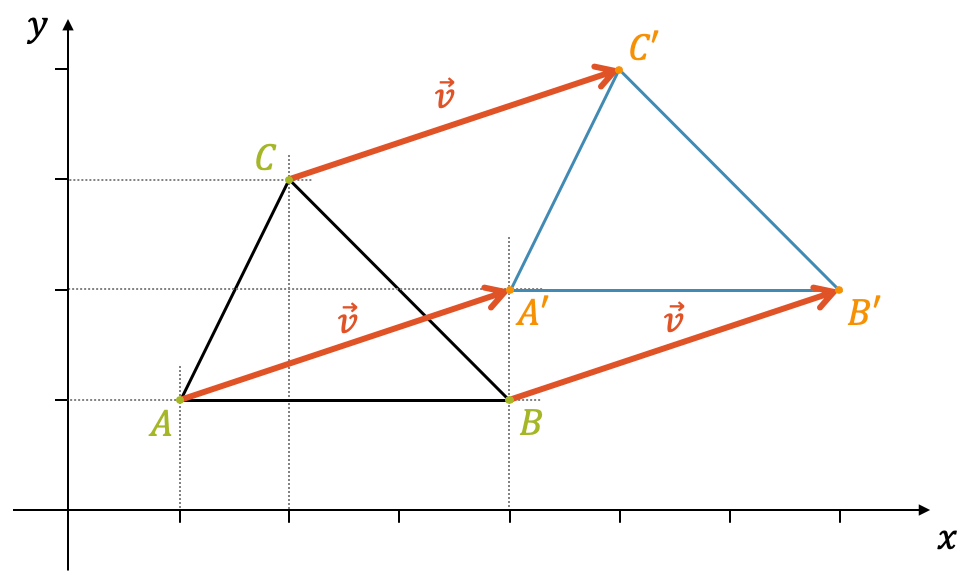
Der Vektor \(\overrightarrow{AA’}\) bildet den Punkt \(A\) in den Punkt \(A’\) ab:
\[ \overrightarrow{AA’}: \quad A(1,1) \; \mapsto \; A'(4,2) \]
Wenn wir die Abbildungen von \(B\) auf \(B’\) bzw. \(C\) auf \(C’\) anschauen, finden wir:
\[ \overrightarrow{BB’}: \quad B(4,1) \; \mapsto \; B'(7,2) \]
\[ \overrightarrow{CC’}: \quad C(2,3) \; \mapsto \; C'(5,4) \]
Wir sehen jetzt, dass \(\;\vec{v}\;\) in allen Fällen die gleiche Abbildung darstellt: Die \(x\)-Koordinate erhöht sich um mit \(\Delta x = +3\) und die \(y\)-Koordinate erhöht sich um \(\Delta y = +1\). Es handelt sich in den drei Fällen um den gleichen Vektor \(\;\vec{v}\;\). Wir schreiben ihn mit seinen Komponenten mit einer Klammer. Oben steht die Änderung der \(x\)-Koordinate, unten die Änderung der \(y\)-Koordinate:
\[ \vec{v} = \begin{pmatrix} 3 \\ 1 \end{pmatrix} \]
Ein Vektor ist eine Abbildung von einem Punkt \(A(A_x,A_y)\) zu einem Punkt \(A'(A’_x,A’_y)\) mit einer Richtung und einer Länge:
\[ \vec{v}: \quad A(A_x,A_y) \; \mapsto \; A'(A’_x,A’_y) \]
Die Komponenten \(v_x\) und \(v_y\) des Vektors \(\vec{v}\) ergeben sich aus den Differenzen der Koordinaten der beiden Punkte. Wir können den Vektor auch als Verschiebung anschauen mit der Änderung der \(x\)-Koordinate um den Betrag \(v_x\) und der \(y\)-Koordinate um den Betrag \(v_y\):
\[ \vec{v} = \begin{pmatrix} v_x \\ v_y \end{pmatrix} = \begin{pmatrix} A’_x – A_x \\ A’_y – A_y \end{pmatrix} \]
Norm eines Vektors
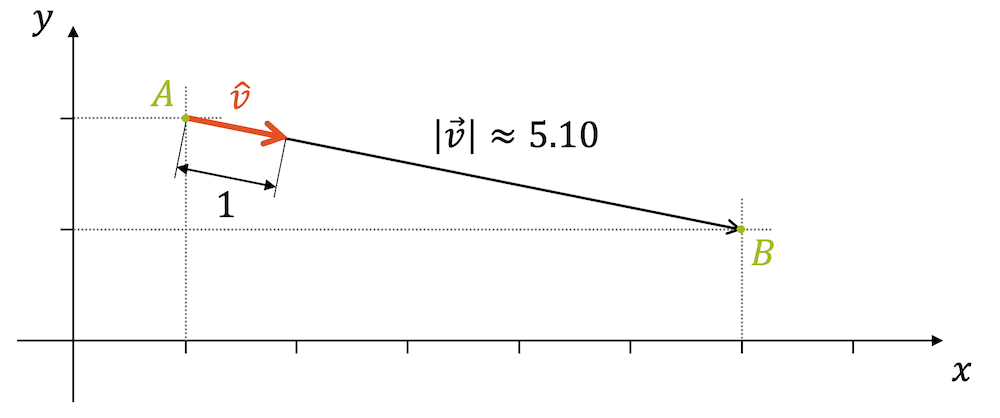
Wie viel beträgt die Länge des Vektors, der den Punkt \(A(1,2)\) auf den Punkt \(B(6,1)\) abbildet?
Zuerst berechnen wir die Komponenten des Vektors \(\vec{v}\):
\[ \vec{v} = \begin{pmatrix} B_x – A_x \\ B_y – A_y \end{pmatrix} \]
\[ = \begin{pmatrix} 6 – 1 \\ 1 – 2 \end{pmatrix} = \begin{pmatrix} 5 \\ -1 \end{pmatrix} \]
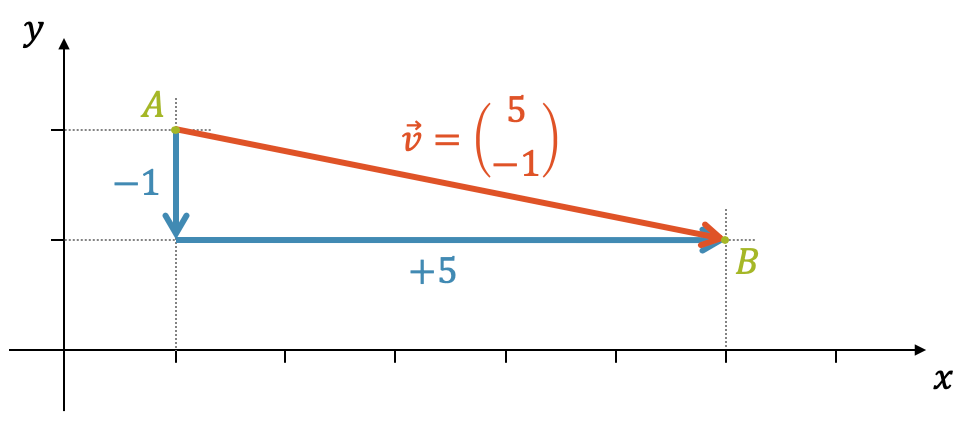
Für die Länge des Vektors benutzen wir natürlich den Satz des Pythagoras. Im Koordinatensystem haben wir mit der Horizontalen und der Vertikalen immer gleich ein rechtwinkliges Dreieck zur Hand. Die Länge des Vektors ist die Länge der Hypotenuse:
\[ |\vec{v}| = \sqrt{5^2 + (-1)^2} \]
\[ = \sqrt{25+1} = \sqrt{26} \approx 5.10 \]
Unter der Norm eines Vektors verstehen wir die Länge des Vektorpfeils. Sie wird aus den Komponenten \(v_x\) und \(v_y\) mit dem Satz des Pythagoras berechnet:
\[ \vec{v} = \begin{pmatrix} v_x \\ v_y \end{pmatrix} \quad \rightarrow \quad v = |\vec{v}| = \sqrt{v_x^2 + v_y^2} \]
Die Norm wird mit Betragsstrichen links und rechts des Vektors geschrieben. Meistens wird mit \(\,v\,\) (ohne Pfeil) automatisch auch die Norm von \(\,\vec{v}\,\) gemeint.
Einheitsvektor
Nebst der Länge eines Vektors, gibt es auch seine Richtung. Sie ist durch die beiden Komponenten des Vektors gegeben. Diese beinhalten aber auch die Länge des Vektors. Um die Richtung von der Länge zu trennen, können wir den Vektor einfach so verkürzen oder verlängern, dass seine Länge genau eins entspricht. Wenn ein Vektor die Länge eins hat, so heisst er Einheitsvektor.
Der Einheitsvektor \(\hat{v}\) hat die gleiche Richtung wie \(\vec{v}\), aber er hat die Länge eins. Er wird auch normierter Vektor genannt, denn seine Länge wurde ”normiert”, d.h. zu eins gebracht. Der Einheitsvektor wird meistens mit einem kleinen Hut, dem sog. Zirkumflex versehen:
\[ \hat{v} \;\;= \;\; \frac{\;\vec{v}\;}{|\vec{v}|} \;=\; \frac{1}{|\vec{v}|} \cdot \vec{v} \]
Wir erhalten den Einheitsvektor bzw. normierten Vektor \(\hat{v}\), indem wir den Vektor \(\vec{v}\) durch seine eigene Länge teilen. Dabei wird jede Komponente des Vektors \(\vec{v}\) durch die gleiche Zahl \(|\vec{v}|\) geteilt.
Beispiel
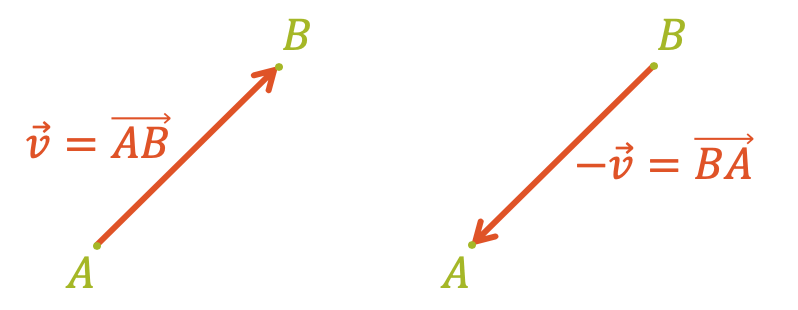
Gegenvektor
Als Gegenvektor bezeichnen wir einen gleich langen Vektor, der parallel zum ersten Vektor ist, aber entgegengesetzt in der Richtung. Er wird gebildet, indem der erste Vektor mit dem Faktor \((-1)\) multipliziert wird:
\[ \vec{v} = \overrightarrow{AB} \]
\[ \rightarrow \quad \overrightarrow{BA} = (-1) \cdot \vec{v} = -\vec{v} \]
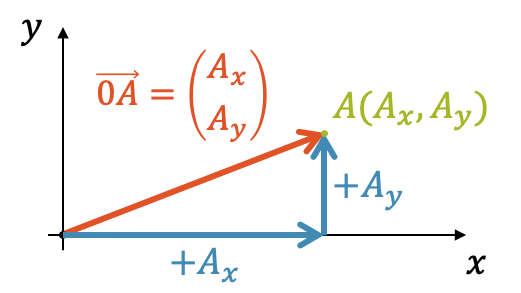
Ortsvektor
Unter dem Ortsvektor des Punktes \(A(A_x,A_y)\) verstehen wir einen Vektor, der vom Koordinatenursprung \(0\) zu diesem Punkt \(A\) zeigt.
\[ \overrightarrow{0A} = \begin{pmatrix} A_x \\ A_y \end{pmatrix} \]
Aufgabensammlung
-
Rechnen mit Vektoren (5031) – Aufg. 1
1 Aufgabe (pdf/Video-Lösung):
Vektoren im Raum aufstellenDu musst dich hier einloggen, um zur Aufgabe zu gelangen.
Noch kein Login?
-
Rechnen mit Vektoren (5031) – Aufg. 2
3 Teilaufgaben (pdf/Video-Lösung):
Dreidimensionales KoordinatensystemDu musst dich hier einloggen, um zur Aufgabe zu gelangen.
Noch kein Login?
-
Rechnen mit Vektoren (5031) – Aufg. 3
4 Teilaufgaben (pdf/Video-Lösung):
Addition von VektorenDu musst dich hier einloggen, um zur Aufgabe zu gelangen.
Noch kein Login?
-
Rechnen mit Vektoren (5031) – Aufg. 4
1 Aufgabe (pdf/Video-Lösung):
Grafischer Beweis betreffend Addition von VektorenDu musst dich hier einloggen, um zur Aufgabe zu gelangen.
Noch kein Login?
-
Rechnen mit Vektoren (5031) – Aufg. 5
3 Teilaufgaben (pdf/Video-Lösung):
Linearkombinationen von VektorenDu musst dich hier einloggen, um zur Aufgabe zu gelangen.
Noch kein Login?

publiziert:
überarbeitet:
publiziert:
überarbeitet:
Schreib deine Frage / Kommentar hier unten rein. Ich werde sie beantworten.
Inhalt


Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.