Das Wichtigste in Kürze
Aus der Forderung, dass der Punkt \(Q\) die gleichen \(x-\), \(y-\) und \(z\)-Koordinaten wie ein Punkt auf der Geraden haben muss, folgt die Vektorgleichung:
\[ \overrightarrow{OQ} \;\;\stackrel{!}{=}\;\; \overrightarrow{OA} + \lambda_0 \cdot \overrightarrow{AB} \]
Dabei handelt es sich eigentlich um zwei oder drei Gleichungen (Dimension der Vektoren) und eine Unbekannte, \(\lambda_0\). Dieses Gleichungssystem ist überbestimmt und es gibt zwei mögliche Szenarien:
-
- Es gibt ein \(\lambda_0\), das mit der Geradengleichung genau zum Punkt \(Q\) führt. Dieser liegt damit auf der Geraden.
- Es gibt kein \(\lambda_0\), das alle drei Gleichungen erfüllt: Der Punkt liegt nicht auf der Geraden.
Der Abstand eines Punkts \(P\) von einer Geraden \(g\) lässt sich berechnen mit:
\[ d = \frac{\Big |\overrightarrow{AB} \times \overrightarrow{AP} \Big|}{\big|\overrightarrow{AB}\big|} \]
Dabei sind der Vektor \(\overrightarrow{AB}\) und der Punkt \(A\) beide auf der Geraden \(g\). Der Vektor \(\overrightarrow{AB}\) wird aus den Ortsvektoren von \(A\) und \(P\) gewonnen:
\[ \overrightarrow{AP} = \overrightarrow{OP} – \overrightarrow{OA} \]
Videos
-
Abstand von Punkten zu Geraden berechnen (5045-3)

Dauer: 23 min 09 s
-
Punkt und Gerade – Punkt auf der Geraden (Tutorial)

Dauer: 5 min 22 s
-
Punkt und Gerade – Abstand zwischen Punkt und Gerade (Tutoral)

Dauer: 11 min 42 s
Punkt auf der Geraden
Liegt ein Punkt auf einer Geraden oder nicht? Nun, das können wir relativ einfach beantworten. Eine Geradengleichung hat ja die folgende Struktur: “Ein Punkt \(A\) auf der Geraden plus ein Vielfaches (\(\lambda\)) eines Vektors (\(\overrightarrow{AB}\)), der die Richtung der Geraden vorgibt, ergibt einen weiteren Punkt \(P\) auf dieser Geraden. Je nach Faktor erhalten wir einen anderen Punkt \(P\). Das gibt schliesslich alle Punkte auf der Geraden.
\[ \overrightarrow{OP} \;\; = \;\; \overrightarrow{OA} + \lambda \cdot \overrightarrow{AB} \]
Wir möchten jetzt wissen, ob ein ganz bestimmter Punkt \(Q\) auf der Geraden liegt, d.h. ob wir den Ortsvektor von \(Q\) mit der Geradengleichung ausdrücken können:
\[ \overrightarrow{OQ} \;\;=\;\; \overrightarrow{OA} + \lambda_0 \cdot \overrightarrow{AB} \]
Beispiel
Untersuche, ob der Punkt \(Q(1,1,1)\) auf der Geraden \(g\) liegt:
\[ g \colon \;\; \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 2 \\ 4 \\ -3 \end{pmatrix} + \lambda \cdot \begin{pmatrix} -2 \\ -6 \\ 8 \end{pmatrix} \]
Aus der Forderung, dass der Punkt \(Q\) die gleichen \(x-\), \(y-\) und \(z\)-Koordinaten wie ein Punkt auf der Geraden haben muss, folgt die Vektorgleichung:
\[ \overrightarrow{OQ} \;\;\stackrel{!}{=}\;\; \overrightarrow{OA} + \lambda_0 \cdot \overrightarrow{AB} \]
Dabei handelt es sich eigentlich um zwei oder drei Gleichungen (Dimension der Vektoren) und eine Unbekannte, \(\lambda_0\). Dieses Gleichungssystem ist überbestimmt und es gibt zwei mögliche Szenarien:
- Es gibt ein \(\lambda_0\), das mit der Geradengleichung genau zum Punkt \(Q\) führt. Dieser liegt damit auf der Geraden.
- Es gibt kein \(\lambda_0\), das alle drei Gleichungen erfüllt: Der Punkt liegt nicht auf der Geraden.
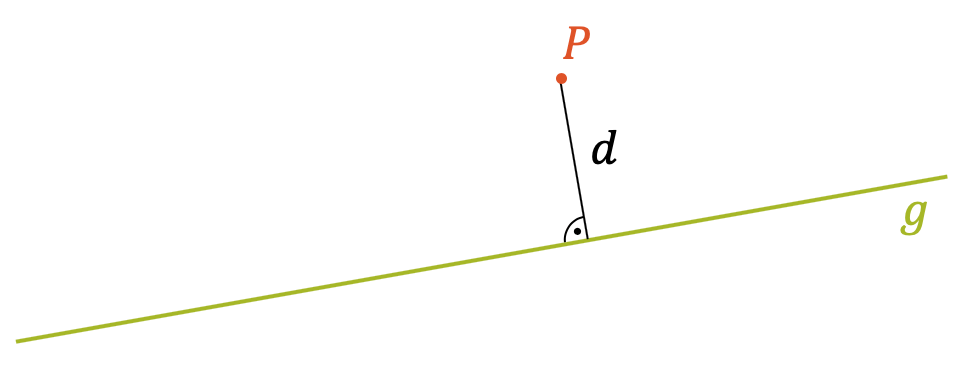
Abstand zwischen Punkt und Gerade
Angenommen wir haben eine Gerade \(g\), die an einem Punkt \(P\) vorbeiführt. Wie gross ist der Abstand \(d\) zwischen der Gerade \(g\) und \(P\)? Dazu brauchen wir natürlich das Lot auf die Gerade, denn das ist die kürzeste Verbindung vom Punkt zur Gerade.
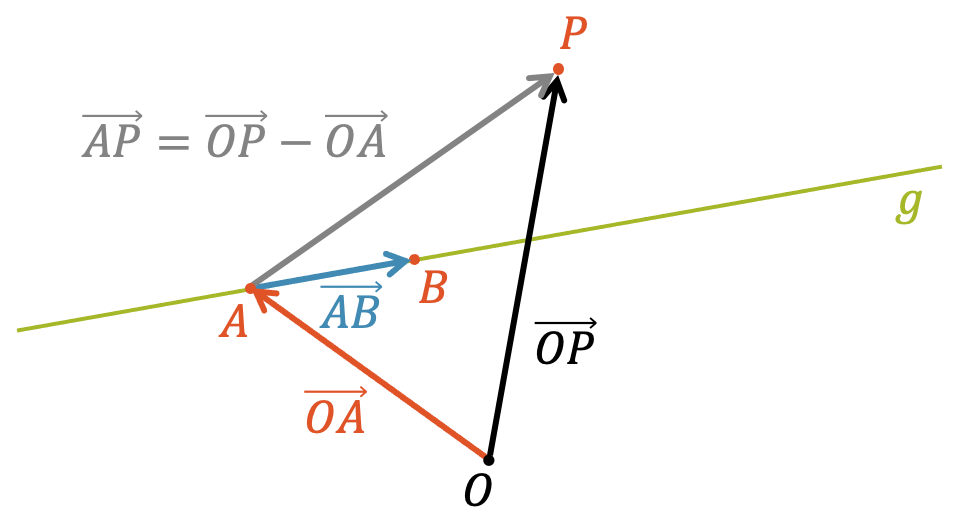
Zuerst wählen wir einen Punkt \(A\) auf \(g\) und bilden eine Vektordifferenz zwischen dem Ortsvektor \(\overrightarrow{OA}\) zum Punkt \(A\) und dem Ortsvektor \(\overrightarrow{OP}\) zum Punkt \(P\), von welchem aus wir den Abstand zu \(g\) herausfinden möchten. Diese Vektordifferenz entspricht dem grauen Vektor von \(A\) nach \(P\) in der nachfolgenden Zeichnung:
\[ \overrightarrow{AP} = \overrightarrow{OP} – \overrightarrow{OA} \]
Mit Hilfe der Vektorgeometrie können wir jetzt ein Vektorprodukt aufstellen, dessen Betrag der Fläche eines Parallelogramms entspricht. Das (orangene) Parallelgramm der Vektoren \(\overrightarrow{AP}\) und \(\overrightarrow{AB}\) hat die gleiche Fläche, wie das (rote) Rechteck mit Grundseite \(\overrightarrow{AP}\) und Höhe \(d\).
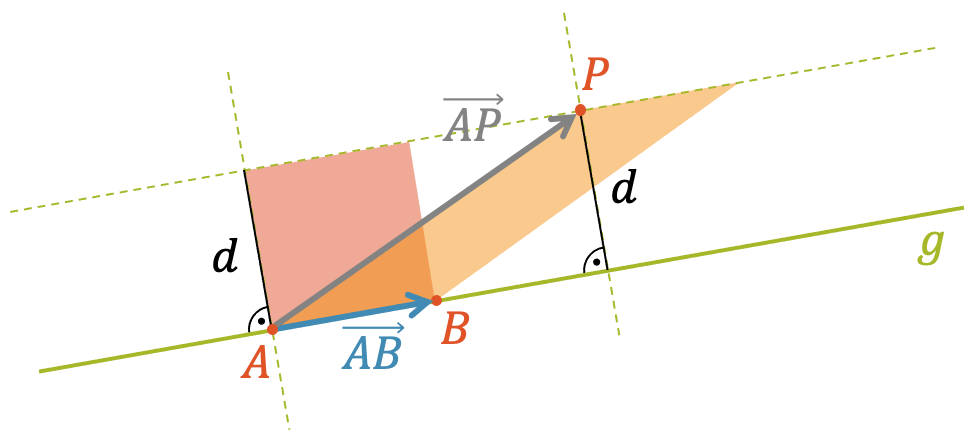
Gemäss dem Prinzip von Cavalieri hat das orangene Parallelogramm die gleiche Fläche \(F\), wie das rote Rechteck:
\[ F = \Big |\overrightarrow{AB} \times \overrightarrow{AP} \Big| = d \cdot |\overrightarrow{AB}| \]
\(F\) können wir mit dem Vektorprodukt berechnen. Da sie auch dem Produkt von Grundseite mit der Länge \(\overrightarrow{AB}\) und der Höhe \(d\) entspricht, können wir sie nach der gesuchten Grösse \(d\) auflösen:
\[ d = \frac{\Big |\overrightarrow{AB} \times \overrightarrow{AP} \Big|}{|\overrightarrow{AB}|} \]
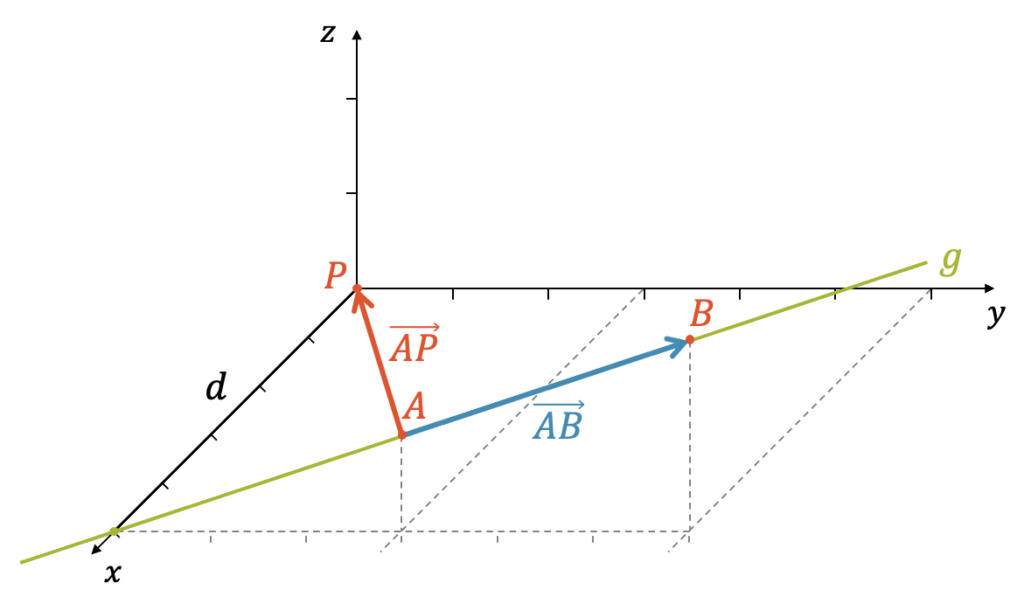
Da wir hier die ganze Sache mit allgemeinen Vektoren beschrieben haben, gilt das auch im Raum für dreidimensionale Vektoren. Das ist dann schon sehr stark, wenn wir den Abstand zu einer Geraden im Raum berechnen können und die Mathematik uns automatisch das Lot auf die Gerade findet.
Der Abstand eines Punkts \(P\) von einer Geraden \(g\) lässt sich berechnen mit:
\[ d = \frac{\Big |\overrightarrow{AB} \times \overrightarrow{AP} \Big|}{\big|\overrightarrow{AB}\big|} \]
Dabei sind der Vektor \(\overrightarrow{AB}\) und der Punkt \(A\) beide auf der Geraden \(g\). Der Vektor \(\overrightarrow{AB}\) wird aus den Ortsvektoren von \(A\) und \(P\) gewonnen:
\[ \overrightarrow{AP} = \overrightarrow{OP} – \overrightarrow{OA} \]
Beispiel
Zeige, dass die Gerade \(g\) im Abstand von \(d=5\) am Ursprung vorbeiführt.
\[ g: \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 5 \\ 3 \\ 1 \end{pmatrix} + \lambda \cdot \begin{pmatrix} 0 \\ 3 \\ 1 \end{pmatrix} \]
Für den Vektor, der auf der Geraden \(g\) liegt, wählen wir aus der Geradengleichung den Vektor \(\overrightarrow{AB} = \begin{pmatrix} 0 \\ 3 \\ 1 \end{pmatrix}\) und für den Punkt \(A\) die Koordinaten \(A(5,3,1)\), ebenfalls aus der Geradengleichung. Der Ursprung ist der Punkt \(P\) mit den Koordinaten \(P(0,0,0)\). Damit gilt für den Vektor \(\overrightarrow{AP}\):
\[ \overrightarrow{AP} = \overrightarrow{OP} – \overrightarrow{OA} \]
\[ = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} – \begin{pmatrix} 5 \\ 3 \\ 1 \end{pmatrix} = \begin{pmatrix} -5 \\ -3 \\ -1 \end{pmatrix} \]
Jetzt können wir das Vektorprodukt berechnen:
\[ \begin{pmatrix} 0 \\ 3 \\ 1 \end{pmatrix} \times \begin{pmatrix} -5 \\ -3 \\ -1 \end{pmatrix} = \begin{pmatrix} 0 \\ -5 \\ 15 \end{pmatrix} \]
Der Betrag davon ist:
\[ \Big| \overrightarrow{AB} \times \overrightarrow{AP} \Big| \]
\[ = \sqrt{0^2 + (-5)^2 + 15^2} \]
\[ = \sqrt{250} = 5 \sqrt{10} \]
Dann berechnen wir noch den Betrag von \(\overrightarrow{AB}\):
\[ \Big| \overrightarrow{AB} \Big| = \sqrt{0^2 + 3^2 + 1^2} \]
\[ = \sqrt{10} \]
So dass wir für den Abstand \(d\) erhalten:
\[ d = \frac{\Big |\overrightarrow{AB} \times \overrightarrow{AP} \Big|}{\big|\overrightarrow{AB}\big|} \]
\[ \require{cancel} = \frac{5 \cancel{\sqrt{10}}}{\cancel{\sqrt{10}}} = \underline{5} \]
Tatsächlich schneidet die Gerade \(g\) die \(x\)-Achse im Punkt \((5,0,0)\). Da sie in einer Ebene verläuft, die parallel ist zur \(y,z\)-Ebene, ist das Lot von \(P\) auf \(g\) gerade in der \(x\)-Achse und somit beträgt \(d=5\).
Aufgabensammlung
-
Geraden im Raum (5045) – Aufg. 3
5 Teilaufgaben (pdf/Video-Lösung):
Abstand von Punkten zu Geraden berechnen
Mini-Test
Um Zugang zum Mini-Test zu kriegen,
musst du vollwertiges Mitglied im Hacker-Club sein.

publiziert:
überarbeitet:
publiziert:
überarbeitet:
Schreib deine Frage / Kommentar hier unten rein. Ich werde sie beantworten.
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.